Mechanics and Craft
Recently, I decided to make significant changes to the tools that I choose in making architectural representations. I resigned myself to the fact that the two small scales that sit on my desk were to be used almost exclusively for to stir cream into my tea and moved the mayline on my drawing surface to the bottom edge so it would be out of the way. In fact, the drawing surface became a table, a ground for my new investigations in making that rely heavily upon digital interfaces. However, my apparent shift away from the motive practice of architecture in itself is not a significant change in practice, given that digital technology in drawing and representation eclipsed the practice of analog drawing some time ago. Indeed, the mechanics of making have an interesting relationship to the process of making drawings and models, and have evolved over time.
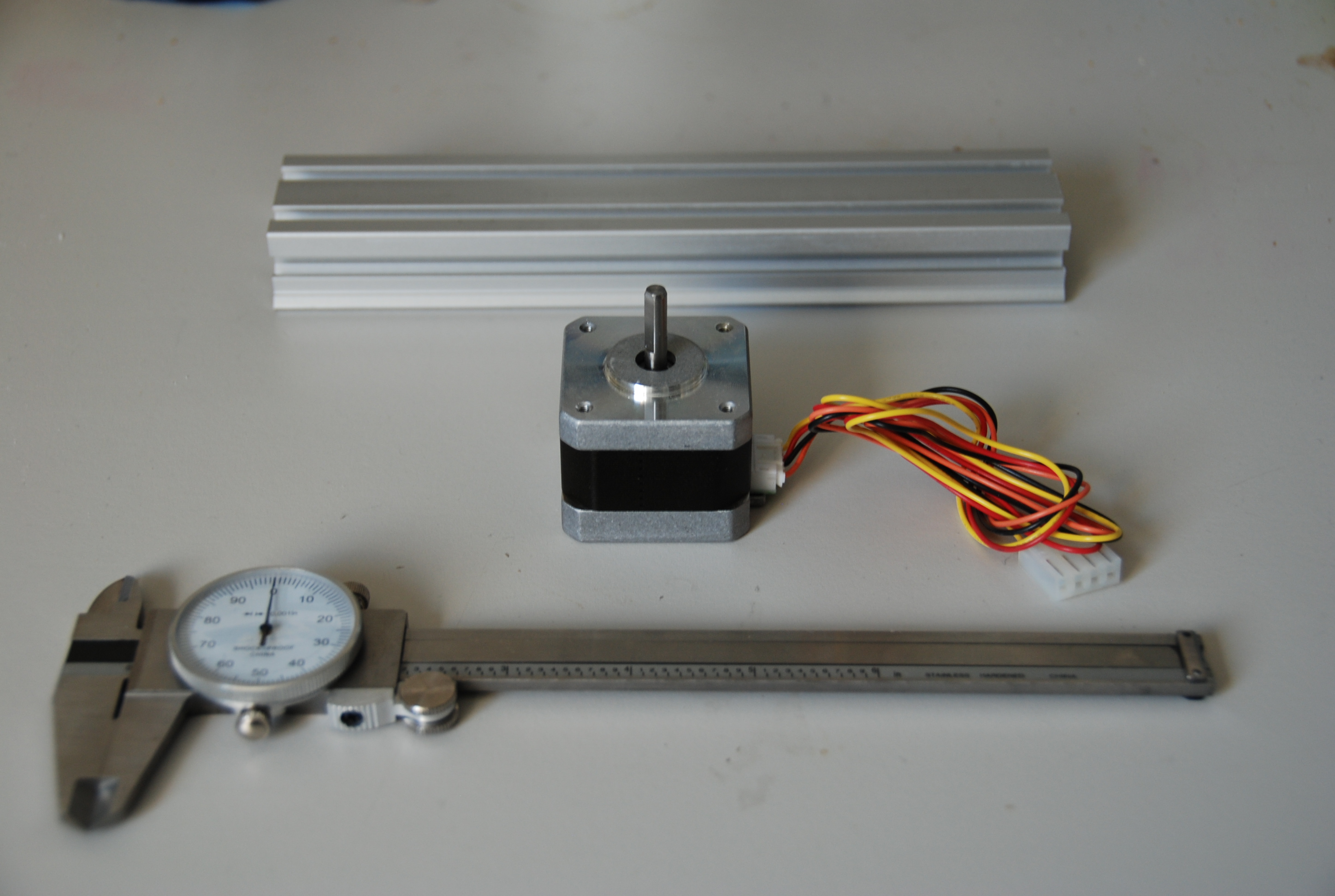
My contemporary tools include a set of calipers to measure material thickness, and stepper motors have replaced the gears and pulleys present in the mayline. The rigor and control offered by the mayline itself is now provided in the form of aluminum extrusions and metal plates assembled to create a Cartesian framework in which surfaces and volumes can be fabricated and envisioned. While assembling the machine, questions related to architectural representation have arisen that and become integral to the process of building the machine. In short, while I have abandoned pens and pencils in favor of other devices, but not at the expense of considering craft. This is an important revelation as representation appears to be increasingly removed from an immediate relationship with the author. Design pedagogy has historically been formulated assuming a proprioceptive relationship between the draftsperson and the drawing sheet, based on the mechanical relationships between the hand, arm, shoulder and eyes. Despite this the devices that are used to construct drawings, tools and objects are transforming the way design becomes manifest as a set of material relationships.
As architecture increasing embraces a model-to-factory or model-to-model mode of making, robotics have taken on an increasing level of significance. In it’s most obvious example, the desire to have access to industrial robots has become a point of completion and envy in schools. The scale and power of these machines offers students a very real possibility to fabricate architecture at a 1:1 scale. The number and location of motorized points makes it possible to carve space, creating dynamic forms and gestures as it the machinery manipulates materials, making the motion of the machine as seduction a the byproducts of its movements.
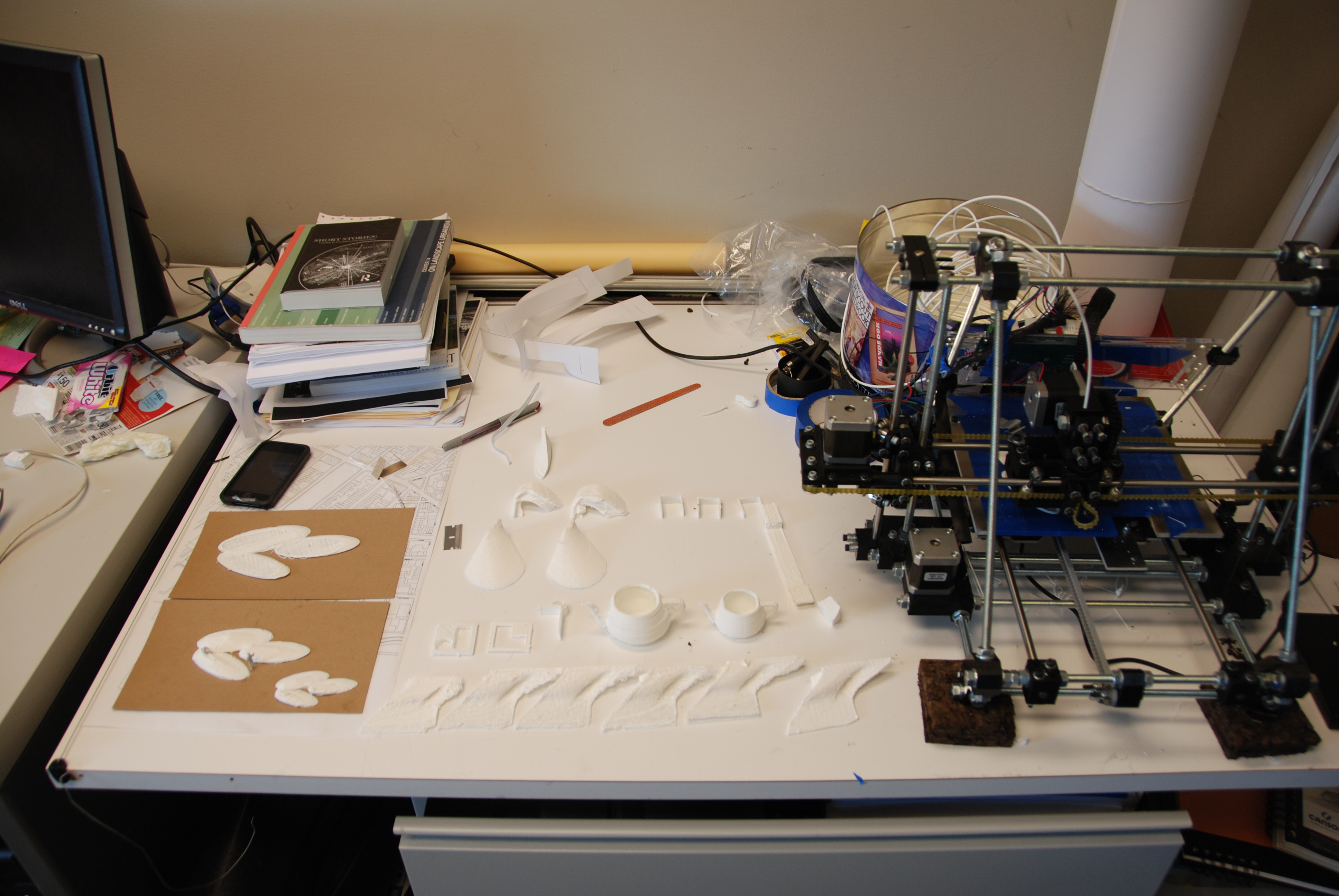
Some of the more “humble” robotic technologies capable of fabricating things, if only small parts, include selective laser sintering (sls) and fusion deposition-modeling (fdm) 3d printers or additive printing. These increasingly popular robots are significantly smaller and not as robust as the industrial robot, and have the ability to generate models with a fine level of detail, depending upon the resolution to which the printer has been calibrated. Both machine types must be designed to respond to the material that is being used to create a part. This is a point of distinction between the industrial robot and the 3d printer. While the robot works primarily by modifying material or surfaces, the sls printer requires that the part be assembled through an aggregate process and the fdm printer uses material that has been brought to its melting point. Still, motors are a critical part in how the machine works by enabling it to operate in a volume described by Cartesian space to create a physical object.
The mechanics of the laser cutter are too far off from those of the additive printer. However in this case, one motor is used to compress the three-dimensional volume of the cabinet into the smallest space allowed by a material. This is a curious situation in that it begins to emulate the analog mechanics of drawing and model making, through the process of treating a material as something that is primarily two-dimensional and modifying it to represent a three-dimensional object. Material parts and architectural projects become the same thing, allowing the designer to transform historic approaches to surface into a material strategy.
These relatively new modes of making rely upon mechanical processes as part of their operation. What makes them distinct from one another is how they describe surfaces or occupy space, but they all are motational tools with that require interfaces to translate geometry into form. This is a important thing to consider given that this is not a new concept in itself. Plotting technology has been present since the 1950’s, using one motor to pull a pen carriage across a surface, while a second motor rotates a roll of paper over a drum. In fact, the drum plotter is more abstracted from analog forms of drawing than the laser cutter, given that the motors are arranged to operate relative to a single line along the drum, versus manipulating an entire sheet of material. Two dimensions are achieved by continuously feeding the roll of sheet material across that single line of interface. The laser printer abstracts this further by using only one motor to rotate sheet material across surface while another set of motors rotate drums with pigmented material applied to them. In this case space is relative given that the surface area of the drum is not equal to that of the sheet material.
Taking these mechanical operations into consideration designers have been working with abstract procedures for some time, bringing up questions regarding where craft lies in the process of making. Robotic tools and their predecessors change the base assumption about what constitutes craft in architecture. While it is safe to assume that it still relies on the basic relationship between intent of the designer, the materials that are at hand and the precision of the mechanical operations, where these things actually reside in practice are called into question. Mental acuity is increasingly working in parity with software designed to describe associative condition or to describe emergent patterns. Material has come to describe wide range of conditions, and physical states of materials, and is beholden to the devices that are used to manipulate it. This leaves the machines that are used to make these manipulations as the point of critical introspection.
In the same way that the conventional draftsperson is expected to have command over the tools and materials used to make a drawing, digital practitioners are expected to understand the mechanical limitations of their digital tools. Quite often this exploration addresses the relationship between intent and material, or how to use a tool to produce a desired result. However, in adopting robotics a third point of resistance and complexity has been added to the design process- the resistance of the tool. The robotic system itself provides a fertile ground for architectural investigation as it does not create a direct translation between intention and material but serves as an interlocutor between the two conditions. It is in the mechanical resistance that craft resides in digital and fabrication practices. So in making the machine the architectural investigation is immediately activated. The limitations of the tool that is constructed for either unique instances or repetitive practices becomes a framework for subsequent modes of material practices and representations.
